Frame loss is measured by sending and receiving frames with frame-loss information between peer MEPs.
Each MEP performs frame-loss measurements which contribute to unavailable time. Since a bidirectional service is defined as unavailable if either of the two directions is declared unavailable, frame-loss measurement must facilitate each MEP to perform near-end and far-end frame loss measurements.
Near-end frame loss refers to frame loss associated with ingress data frames, while far-end frame loss refers to frame loss associated with egress data frames. Both near-end and far-end frame loss measurements contribute to near-end severely errored seconds (near-end SES) and far-end severely errored seconds (far-end SES) respectively, which together contribute to unavailable time.
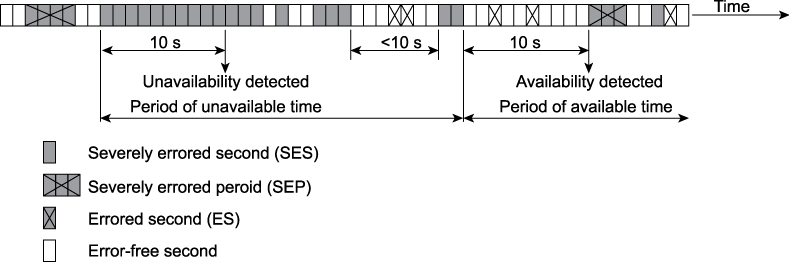
A period of unavailable time begins at the onset of x consecutive Severely Errored Seconds (SES) events. These x seconds are part of unavailable time. A new period of available time begins at the onset of x consecutive non-SES events. These x seconds are part of available time.
A SES is declared when, during one measurement period, the number of frames lost exceeds a threshold. ExtremeXOS logs the start and end time of the unavailable periods (see SES from ITU-T G.7710).
 Print
this page
Print
this page Email this topic
Email this topic Feedback
Feedback View PDF
View PDF Download EPUB
Download EPUB